Распознавание образов. Распознавание образов — Национальная библиотека им. Н. Э. Баумана
Современные роботы, снабженные системами технического зрения, способны хорошо видеть, чтобы работать с реальным миром. Они могут делать заключение о том, какого типа объекты присутствуют, в каких отношениях они находятся между собой, какие группы образуют.
Суть задачи распознавания – установить, обладают ли изучаемые объекты фиксированным конечным набором признаков, позволяющим отнести и ке определенному классу.
Цели науки распознавания образов:
Замена человеческого эксперта или сложной экспертной системы более простой системой (автоматизация деятельности человека или упрощение сложных систем);
Построение обучающихся систем, которые умеют принимать решения без указания четких правил, а именно, систем, которые умеют сами синтезировать правила принятия решений на основе некоторого конечного количества «продемонстрированных» системе примеров правильных решений.
Задачи распознавания можно охарактеризовать следующим образом.
1.Это информационные задачи, состоящие из двух основных этапов: приведение исходных данных к виду, удобному для распознавания и собственно распознавание.
2. В эти задачах можно вводить понятие аналогии Ии подобия объектов и формулировать понятие близости объектов в качестве основания для зачисления объекта в определенный класс.
3. В этих задачах можно оперировать набором примеров, классификация которых известна и которые в виде формализованных описаний могут быть предъявлены алгоритму распознавания для настройки на задачу в процессе обучения.
4. Для этих задач трудно строить формальные теории и применять классические математические методы.
5. В этих задачах возможна «плохая» информация.
Типы задач распознавания:
Отнесение предъявленного объекта к одному из классов (обучение с учителем);
Автоматическая классификация – разбиение множества объектов (ситуаций) по их описанияю на систему непересекающихся классов;
Выбор набора информатиыных признаков при распощнавании;
Приведение исходных данных к виду, удобному для распознавания;
Динамическое распознавание и динамическая классификация;
Задачи прогнозирования.
Основные определения
Образ – этоcтруктурированное описание объекта или явления, представленное вектором признаков, каждый элемент которого представляет числовое значение одного из признаков, характеризующих данный объект. Другими словами: образ - любой объект, для которого можно измерить набор определенных числовых признаков. Пример образа: буква, изображение, кардиограмма, и т.п.
Числовой признак (или просто признак). – это формула или иное описание способа сопоставления объекту некоторой числовой характеристики, которое действует в рамках конкретной задачи распознавания образов. Для каждого объекта может быть определено несколько различных признаков, то есть несколько числовых характеристик.
Пространство признаков .N-мерное пространство, определенное для данной задачи распознавания, гдеN– фиксированное число измеряемых признаков для любых объектов. Вектор из пространства признаков, соответствующий объекту задачи распознавания этоN-мерный вектор с компонентами (х1,х2, …, хN), которые являются значениями признаков данного объекта.
ОБЪЕКТ->Nпризнаков->M-мерный вектор признаков
Класс - неформализируемое (как правило) представление о возможности отнесения произвольного объекта из множества объектов задачи распознавания к определенной группе объектов. Для объектов одного класса предполагается наличие «схожести». Для задачи распознавания образов может быть определено произвольное количество классов, большее 1. Количество классов обозначается числомS.
В целом проблема распознавания образов состоит из двух частей: распознавания и обучении.
Распознавание образов заключается в классификации некоторой группы объектов на основе определенных требований. Объекты, относимые к одному классу образов, обладают общими свойствами. Требования, определяющие классификацию, могут быть различными, так как в различных ситуациях возникает необходимость в различных типах классификаций.
Например, при распознавании английских букв образуется 26 классов образов. Однако, чтобы отличить при распознавании английские буквы от китайских иероглифов, нужны лишь два класса образов.
Простейший подход к распознаванию образов заключается в сопоставлении с эталонами. В этом случае некоторое множество образов, по одному из каждого класса образов, хранится в памяти машины. Входной (распознаваемый) образ (неизвестного класса) сравнивается с эталоном каждого класса. Классификация основывается на заранее выбранном критерии соответствия или критерии подобия. Другими словами, если входной образ лучше соответствует эталону i-го класса образов, чем любому другому эталону, то входной образ классифицируется как принадлежащийi-му классу образов.
Недостаток этого подхода, т. е. сопоставления с эталоном, заключается в том, что в ряде случаев трудно выбрать подходящий эталон из каждого класса образов и установить необходимый критерий соответствия.
Более совершенный подход заключается в том, что классификация основывается на некотором множестве отобранных замеров, производимых на входных образах. Эти отобранные замеры, называемые «признаками», предполагаются инвариантными или малочувствительными по отношению к обычно встречающимся изменениям и искажениям и обладающими небольшой избыточностью.
Частный случай второго подхода «измерения признаков», при котором эталоны хранятся в виде измеренных признаков и в классификаторе используется специальный критерий классификации (сопоставление).
Признаки определяются разработчиками и должны быть инвариантны к ориентации, размеру и вариациям формы объектов.
В этой статье я задался целью осветить некоторые фундаментальные результаты теории машинного обучения таким образом, чтобы концепции были понятны читателям, немного знакомыми с задачами классификации и регрессии. Идея написать такую статью все четче проявлялась в моем сознании с каждой прочитанной книгой, в которой идеи обучения машин распознаванию рассказывались как бы с середины и совершенно не понятно, на что авторы того или иного метода опирались при его разработке. С другой стороны существует ряд книг, посвященных основным концепциям в машинном обучении, но изложение материала в них может показаться слишком сложным для первого прочтения.Мотивация
Рассмотрим такую задачу. У нас есть яблоки двух классов - вкусные и не вкусные, 1 и 0. Яблоки обладают признаками - цветом и размером. Цвет изменятся непрерывно от 0 до 1, т.е. 0 -полностью зеленое яблоко, 1 - полностью красное. Размер может меняться аналогично, 0 - яблоко маленькое, 1 - большое. Мы хотели бы разработать алгоритм, который бы получал на вход цвет и размер, а на выходе отдавал класс яблока - вкусное оно или нет. Весьма желательно, чтобы число ошибок при этом было чем меньше тем лучше. При этом мы обладаем конечным списком, в котором указаны исторические данные о цвете, размере и классе яблок. Как бы мы могли решать такую задачу?Логический подход
Решая нашу задачу, первый метод, который возможно придет на ум, может быть такой: давайте вручную составим правила типа if-else и в зависимости от значений цвета и размера будем присваивать яблоку определенный класс. Т.е. у нас есть предпосылки - это цвет и размер, и есть следствие - вкус яблока. Вполне разумно, когда признаков немного и можно на глаз оценить пороги для сравнения. Но может случится так, что придумать четкие условия не получится, и из данных не очевидно какие пороги брать, да и число признаков может увеличиваться в перспективе. А что делать, если в нашем списке с историческими данными, мы обнаружили два яблока с одинаковыми цветом и размером, но одно помечено как вкусное, а другое нет? Таким образом наш первый метод не настолько гибкий и масштабируемый, как нам бы хотелось.Обозначения
Введем следующую нотацию. Будем обозначать -ое яблоко как . В свою очередь каждый состоит из двух чисел - цвета и размера. Этот факт мы будем обозначать парой чисел: . Класс каждого -го яблока мы обозначим как . Список с историческими данными обозначим буквой , длина этого списка равна . -ый элемент этого списка есть значение признаков яблока и его класс. Т.е. . Так же будем называть выборкой. Большими буквами и мы обозначим переменные, которые могут принимать значения конкретного признака и класса. Веедем новое понятие - решающее правило есть функция, которая принимает на вход значение цвета и размера , а на выходе возвращает метку класса:Вероятностный подход
Развивая идею логического метода с предпосылками и следствиями, зададим себе вопрос - а какова вероятность того, что -ое яблоко, которое не принадлежит нашей выборке будет вкусное, при условии измеренных значений цвета и размера? В нотации теории вероятностей этот вопрос можно записать так:В этом выражении можно интерпретировать как посылку, как следствие, но переход от посылки к следствию будет подчинятся вероятностным законам, а не логическим. Т.е. вместо таблицы истинности с булевскими значениями 0 и 1 для класса, будут значения вероятности, которые принимают значения от 0 до 1. Применим формулу Байеса и получим следующее выражение:
Рассмотрим правую часть этого выражения более подробно. Множитель называется априорной вероятностью и означает вероятность встретить вкусное яблоко среди всех возможных яблок. Априорная вероятность встретить невкусное яблоко есть . Эта вероятность может отражать наше личное знание о том, как распределены вкусные и невкусные яблоки в природе. Например, по нашему прошлому опыту мы знаем, что 80% всех яблок - вкусные. Или мы можем оценить это значение просто посчитав долю вкусных яблок в нашем списке с историческими данными S. Следующий множитель - показывает, насколько вероятно получить конкретное значение цвета и размера для яблока класса 1. Это выражение так же называется функцией правдоподобия и может иметь вид какого-нибудь конкретного распределения, например, нормального. Знаменатель мы используем в качестве нормировочной константы, что бы искомая вероятность изменялась в пределах от 0 до 1. Нашей конечной целью является не поиск вероятностей, а поиск решающего правила, которое бы сразу давало нам класс. Конечный вид решающего правила зависит от того, какие значения и параметры нам известны. Например, мы можем знать только значения априорной вероятности, а остальные значения оценить невозможно. Тогда решающее правило будет такое - ставить всем яблокам значение того класса, для которого априорная вероятность наибольшая. Т.е. если мы знаем, что 80% яблок в природе вкусные, то каждому яблоку ставим класс 1. Тогда наша ошибка составит 20%. Если же мы к тому же можем оценить значения функции правдоподобия $p(X=x_m | Y=1)$, то можем и найти значение искомой вероятности по формуле Байеса, как написано сверху. Решающее правило здесь будет таким: поставить метку того класса, для которого вероятность максимальна:
Это правило назовем Байесовским классификатором. Поскольку мы имеем дело с вероятностями, то даже большое значение вероятности не дает гарантий, что яблоко не принадлежит к классу 0. Оценим вероятность ошибки на яблоке следующим образом: если решающее правило вернуло значение класса равное 1, то вероятность ошибиться будет и наоборот:
Нас интересует вероятность ошибки классификатора не только на данном конкретном примере, но и вообще для всех возможных яблок:
Это выражение является математическим ожидаем ошибки . Итак, решая исходную проблему мы пришли к байесовскому классификатору, но какие у него есть недостатки? Главная проблема - оценить из данных условную вероятность . В нашем случае мы представляем объект парой чисел - цвет и размер, но в более сложных задачах размерность признаков может быть в разы выше и для оценки вероятности многомерной случайной величины может не хватить числа наблюдений из нашего списка с историческими данными. Далее мы попробуем обобщить наше понятие ошибки классификатора, а так же посмотрим, можно ли подобрать какой-либо другой классификатор для решения проблемы.
Потери от ошибок классификатора
Предположим, что у нас уже есть какое-либо решающее правило . Тогда оно может совершить два типа ошибок - первый, это причислить объект к классу 0, у которого реальный класс 1 и наоборот, причислить объект к классу 1, у которого реальный класс 0. В некоторых задачах бывает важно различать эти случаи. Например, мы страдаем больше от того, что яблоко, помеченное как вкусное, оказалось невкусным и наоборот. Степень нашего дискомфорта от обманутых ожиданий мы формализуем в понятии Более обще - у нас есть функция потерь, которая возвращает число для каждой ошибки классификатора. Пусть - реальная метка класса. Тогда функция потерь возвращает величину потерь для реальной метки класса и значения нашего решающего правила . Пример применения этой функции - берем из яблоко с известным классом , передаем яблоко на вход нашему решающему правилу , получаем оценку класса от решающего правила, если значения и совпали, то считаем что классификатор не ошибся и потерь нет, если значения не совпадают, то величину потерь скажет наша функцияУсловный и байесовский риск
Теперь, когда у нас есть функция потерь и мы знаем, сколько мы теряем от неправильной классификации объекта , было бы неплохо понять, сколько мы теряем в среднем, на многих объектах. Если мы знаем величину - вероятность того, что -ое яблоко будет вкусное, при условии измеренных значений цвета и размера, а так же реальное значение класса(например возьмем яблоко из выборки S, см. в начале статьи), то можем ввести понятие условного риска. Условный риск есть средняя величина потерь на объекте для решающего правила :В нашем случае бинарной классификации когда получается:
Выше мы описывали решающее правило, которое относит объект к тому классу, который имеет наибольшее значение вероятности Такое правило доставляет минимум нашим средним потерям(байесовскому риску), поэтому Байесовский классификатор является оптимальным с точки зрения введенного нами функционала риска. Это значит, что Байесовский классификатор имеет наименьшую возможную ошибку классификации.
Некоторые типовые функции потерь
Одной из наиболее частовстречающихся функций потерь является симметричная функция, когда потери от первого и второго типов ошибок равнозначны. Например, функция потерь 1-0 (zero-one loss) определяется так:Тогда условный риск для a(x) = 1 будет просто значением вероятности получить класс 0 на объектке :
Аналогично для a(x) = 0:
Функция потерь 1-0 принимает значение 1, если классификатор делает ошибку на объекте и 0 если не делает. Теперь сделаем так, чтобы значение на ошибке равнялось не 1, а другой функции Q, зависящей от решающего правила и реальной метки класса:
Тогда условный риск можно записать так:
Замечания по нотации
Предыдущий текст был написан согласно нотации, принятой в книге Дуды и Харта. В оригинальной книге В.Н. Вапника рассматривался такой процесс: природа выбирает объект согласно распределению $p(x)$, а затем ставит ему метку класса согласно условному распределению $p(y|x)$. Тогда риск(матожидание потерь) определяется какГде - функция, которой мы пытаемся аппроксимировать неизвестную зависимость, - функция потерь для реального значения и значения нашей функции . Эта нотации более наглядна для того чтобы ввести следущее понятие - эмпирический риск.
Эмпирический риск
На данном этапе мы уже выяснили, что логический метод нам не подходит, потому что он недостаточно гибкий, а байесовский классификатор мы не можем использовать, когда признаков много, а данных для обучения ограниченное число и мы не сможем восстановить вероятность . Так же нам известно, что байесовский классификатор обладает наименьшей возможной ошибкой классификации. Раз уж мы не можем использовать байесовский классификатор, давайте возьмем что-нибудь по проще. Давайте зафиксируем некоторое параметрическое семейство функций H и будем подбирать классификатор из этого семейства.Пример: пусть множество всех функций вида
Все функции этого множества будут отличаться друг от друга только коэффициентами Когда мы выбрали такое семейство, мы предположили, что в координатах цвет-размер между точками класса 1 и точками класса 0 можно провести прямую линию с коэффициентами таким образом, что точки с разными классами находятся по разные стороны от прямой. Известно, что у прямой такого вида вектор коэффициентов является нормалью к прямой. Теперь делаем так - берем наше яблоко, меряем у него цвет и размер и наносим точку с полученными координатами на график в осях цвет-размер. Далее меряем угол между этой точкой и вектором $w$. Замечаем, что наша точка может лежать либо по одну, либо по другую сторону от прямой. Тогда угол между и точкой будет либо острый, либо тупой, а скалярное произведение либо положительное, либо отрицательное. Отсюда вытекает решающее правило:
После того как мы зафиксировали класс функций $Н$, возникает вопрос - как выбрать из него функцию с нужными коэффициентами? Ответ - давайте выберем ту функцию, которая доставляет минимум нашему байесовскому риску $R()$. Опять проблема - чтобы посчитать значения байесовского риска, нужно знать распределение $p(x,y)$, а оно нам не дано, и восстановиь его не всегда возможно. Другая идея - минимизировать риск не на всех возможных объектах, а только на выборке. Т.е. минимизировать функцию:
Эта функция и называется эмпирическим риском. Следующий вопрос - почему мы решили, что минимизируя эмпирический риск, мы при этом так же минимизируем байесовский риск? Напомню, что наша задача практическая - допустить как можно меньше ошибок классификации. Чем меньше ошибок, тем меньше байесовский риск. Обоснование о сходимости эмпирического риска к байесовскому с ростом объема данных было получено в 70-е годы двумя учеными - В. Н. Вапником и А. Я. Червоненкисом.
Гарантии сходимости. Простейший случай
Итак, мы пришли к тому, что байесовский классификатор дает наименьшую возможною ошибку, но обучить его в большинстве случаев мы не можем и ошибку(риск) посчитать мы тоже не в силах. Однако, мы можем посчитать приближение к байесовскокому риску, которое называется эмпирический риск, а зная эмпирический риск подобрать такую аппроксимирующую функцию, которая бы минимизировала эмпирический риск. Давайте рассмотрим простейшую ситуацию, когда минимизация эмпирического риска дает классификатор, так же минимизирующий байесовский риск. Для простейшего случая нам придется сделать предположение, которое редко выполняется на практике, но которое в дальнейшем можно будет ослабить. Зафиксируем конечный класс функций из которого мы будем выбирать наш классификатор и предположим, что настоящая функция, которую использует природа для разметки наших яблок на вкусы находится в этом конечном множестве гипотез: . Так же у нас есть выборка , полученная из распределения над объектами . Все объекты выборки считаем одинаково независимо распределенными(iid). Тогда будет верна следующаяТеорема
Выбирая функцию из класса с помощью минимизации эмпирического риска мы гарантированно найдем такую , что она имеет небольшое значение байесовского риска если выборка, на которой мы производим минимизацию имеет достаточный размер.Что значит «небольшое значение» и «достаточный размер» см. в литературе ниже.
Идея доказательства
По условию теоремы мы получаем выборку из распределения , т.е. процесс выбора объектов из природы случаен. Каждый раз, когда мы собираем выборку она будет из того же распределения, но сами объекты в ней могут быть различны. Главная идея доказательства состоит в том, что мы можем получить такую неудачную выборку , что алгоритм, который мы выберем с помощью минимизации эмпирического риска на данной выборке будет плохо минимизировать байесовский риск но при этом хорошо минимизировать эмпирический риск, но вероятность получить такую выборку мала и ростом размера выборки эта вероятность падает. Подобные теоремы существуют и для более реалистичных предположений, но здесь мы не будем их рассматривать.Практические результаты
Имея доказательства того, что функция, найденная при минимизации эмпирического риска не будет иметь большую ошибку на ранее не наблюдаемых данных при достаточном размере обучающей выборки мы можем использовать этот принцип на практике, например, следующим образом - берем выражение:И подставляем разные функции потерь, в зависимости от решаемой задачи. Для линейной регрессии:
Для логистической регресии:
Несмотря на то, что за методом опорных векторов лежит в основном геометрическая мотивация, его так же можно представить как проблему минимизации эмпирического риска.
Заключение
Многие методы обучения с учителем можно рассматривать в том числе как частные случаи теории, разработанной В. Н. Вапником и А. Я. Червоненкисом. Эта теория дает гарантии относительно ошибки на тестовой выборке при условии достаточного размера обучающей выборки и некоторых требований к пространству гипотез, в котором мы ищем наш алгоритм.Используемая литература
- The Nature of Statistical Learning Theory, Vladimir N. Vapnik
- Pattern Classification, 2nd Edition, Richard O. Duda, Peter E. Hart, David G. Stork
- Understanding Machine Learning: From Theory to Algorithms, Shai Shalev-Shwartz, Shai Ben-David
Теги: Добавить метки
В целом, можно выделить три метода распознавания образов: Метод перебора. В этом случае производится сравнение с базой данных, где для каждого вида объектов представлены всевозможные модификации отображения. Например, для оптического распознавания образов можно применить метод перебора вида объекта под различными углами, масштабами, смещениями, деформациями и т. д. Для букв нужно перебирать шрифт, свойства шрифта и т. д. В случае распознавания звуковых образов, соответственно, происходит сравнение с некоторыми известными шаблонами (например, слово, произнесенное несколькими людьми).
Второй подход - производится более глубокий анализ характеристик образа. В случае оптического распознавания это может быть определение различных геометрических характеристик. Звуковой образец в этом случае подвергается частотному, амплитудному анализу и т. д.
Следующий метод - использование искусственных нейронных сетей (ИНС). Этот метод требует либо большого количества примеров задачи распознавания при обучении, либо специальной структуры нейронной сети, учитывающей специфику данной задачи. Тем не менее, его отличает более высокая эффективность и производительность.
4. История распознавания образов
Рассмотрим кратко математический формализм распознавания образов. Объект в распознавании образов описывается совокупностью основных характеристик (признаков, свойств). Основные характеристики могут иметь различную природу: они могут браться из упорядоченного множества типа вещественной прямой, либо из дискретного множества (которое, впрочем, так же может быть наделено структурой). Такое понимание объекта согласуется как потребностью практических приложений распознавания образов, так и с нашим пониманием механизма восприятия объекта человеком. Действительно, мы полагаем, что при наблюдении (измерении) объекта человеком, сведения о нем поступают по конечному числу сенсоров (анализируемых каналов) в мозг, и каждому сенсору можно сопоставить соответствующую характеристику объекта. Помимо признаков, соответствующих нашим измерениям объекта, существует так же выделенный признак, либо группа признаков, которые мы называем классифицирующими признаками, и в выяснении их значений при заданном векторе Х и состоит задача, которую выполняют естественные и искусственные распознающие системы.
Понятно, что для того, чтобы установить значения этих признаков, необходимо иметь информацию о том, как связаны известные признаки с классифицирующими. Информация об этой связи задается в форме прецедентов, то есть множества описаний объектов с известными значениями классифицирующих признаков. И по этой прецедентной информации и требуется построить решающее правило, которое будет ставить произвольному описанию объекта значения его классифицирующих признаков.
Такое понимание задачи распознавания образов утвердилось в науке начиная с 50-х годов прошлого века. И тогда же было замечено что такая постановка вовсе не является новой. С подобной формулировкой сталкивались и уже существовали вполне не плохо зарекомендовавшие себя методы статистического анализа данных, которые активно использовались для многих практических задач, таких как например, техническая диагностика. Поэтому первые шаги распознавания образов прошли под знаком статистического подхода, который и диктовал основную проблематику.
Статистический подход основывается на идее, что исходное пространство объектов представляет собой вероятностное пространство, а признаки (характеристики) объектов являют собой случайные величины заданные на нем. Тогда задача исследователя данных состояла в том, чтобы из некоторых соображений выдвинуть статистическую гипотезу о распределении признаков, а точнее о зависимости классифицирующих признаков от остальных. Статистическая гипотеза, как правило, представляла собой параметрически заданное множество функций распределения признаков. Типичной и классической статистической гипотезой является гипотеза о нормальности этого распределения (разновидностей таких гипотез статистики придумали великое множество). После формулировки гипотезы оставалось проверить эту гипотезу на прецедентных данных. Это проверка состояла в выборе некоторого распределения из первоначально заданного множества распределений (параметра гипотезы о распределении) и оценки надежности(доверительного интервала) этого выбора. Собственно эта функция распределения и была ответом к задаче, только объект классифицировался уже не однозначно, но с некоторыми вероятностями принадлежности к классам. Статистиками были разработано так же и ассимптотическое обоснование таких методов. Такие обоснования делались по следующей схеме: устанавливался некоторый функционал качества выбора распределения (доверительный интервал) и показывалось, что при увеличении числа прецедентов, наш выбор с вероятностью стремящейся к 1 становился верным в смысле этого функционала (доверительный интервал стремился к 0). Забегая вперед скажем, что статистический взгляд на проблему распознавания оказался весьма плодотворным не только в смысле разработанных алгоритмов (в число которых входят методы кластерного, дискриминантного анализов, непараметрическая регрессия и т.д.), но и привел впоследствии Вапника к созданию глубокой статистической теории распознавания.
Тем не менее существует серьезная аргументация в пользу того, что задачи распознавания образов не сводятся к статистике. Любую такую задачу, в принципе, можно рассматривать со статистической точки зрения и результаты ее решения могут интерпретироваться статистически. Для этого необходимо лишь предположить, что пространство объектов задачи является вероятностным. Но с точки зрения инструментализма, критерием удачности статистической интерпретации некоторого метода распознавания может служить лишь наличие обоснавания этого метода на языке статистики как раздела математики. Под обоснаванием здесь понимается выработка основных требований к задаче которые обеспечивают успех в применении этого метода. Однако на данный момент для большей части методов распознавания, в том числе и для тех, которые напрямую возникли в рамках статистического подхода, подобных удовлетворительных обоснований не найдено. Кроме этого, наиболее часто применяемые на данный момент статистические алгоритмы, типа линейного дискриминанта Фишера, парзеновского окна, EM-алгоритма, метода ближайших соседей, не говоря уже о байесовских сетях доверия, имеют сильно выраженный эвристический характер и могут иметь интерпретации отличные от статистических. И наконец, ко всему вышесказанному следует добавить, что помимо асимптотического поведения методов распознавания, которое и является основным вопросом статистики, практика распознавания ставит вопросы вычислительной и структурной сложности методов, которые выводят далеко за рамки одной лишь теории вероятностей.
Итого, вопреки стремлениям статистиков рассматривать распознавание образов как раздел статистики, в практику и идеологию распознавания входили совершенно другие идеи. Одна из них была вызвана исследованиями в области распознавания зрительных образов и основана на следующей аналогии.
Как уже отмечалось, в повседневной жизни люди постоянно решают (зачастую бессознательно) проблемы распознавания различных ситуаций, слуховых и зрительных образов. Подобная способность для ЭВМ представляет собой в лучшем случае дело будущего. Отсюда некоторыми пионерами распознавания образов был сделан вывод, что решение этих проблем на ЭВМ должно в общих чертах моделировать процессы человеческого мышления. Наиболее известной попыткой подойти к проблеме с этой стороны было знаменитое исследование Ф. Розенблатта по перцептронам .
К середине 50-х годов казалось, что нейрофизиологами были поняты физические принципы работы мозга (в книге "Новый Разум Короля" знаменитый британский физик-теоретик Р. Пенроуз интересно ставит под сомнение нейросетевую модель мозга, обосновывая существенную роль в его функционировании квантово-механических эффектов; хотя, впрочем, эта модель подвергалась сомнению с самого начала. Отталкиваясь от этих открытий Ф.Розенблатт разработал модель обучения распознаванию зрительных образов, названную им персептроном. Персептрон Розенблатта представляет собой следующую функцию (рис. 1):
Рис 1. Схема Персептрона
На входе персептрон получает вектор объекта, который в работах Розенблатта представлял собой бинарный вектор, показывавший какой из пикселов экрана зачернен изображением а какой нет. Далее каждый из признаков подается на вход нейрона, действие которого представляет собой простое умножение на некоторый вес нейрона. Результаты подаются на последний нейрон, который их складывает и общую сумму сравнивает с некоторым порогом. В зависимости от результатов сравнения входной объект Х признается нужным образом либо нет. Тогда задача обучения распознаванию образов состояла в таком подборе весов нейронов и значения порога, чтобы персептрон давал на прецедентных зрительных образах правильные ответы. Розенблатт полагал, что получившаяся функция будет неплохо распознавать нужный зрительный образ даже если входного объекта и не было среди прецедентов. Из бионических соображений им так же был придуман и метод подбора весов и порога, на котором останавливаться мы не будем. Скажем лишь, что его подход оказался успешным в ряде задач распознавания и породил собой целое направление исследований алгоритмов обучения основанных на нейронных сетях, частным случаем которых и является персептрон.
Далее были придуманы различные обобщения персептрона, функция нейронов была усложнена: нейроны теперь могли не только умножать входные числа или складывать их и сравнивать результат с порогами, но применять по отношению к ним более сложные функции. На рисунке 2 изображено одно из подобных усложнений нейрона:

Рис. 2 Схема нейронной сети.
Кроме того топология нейронной сети могла быть значительно сложнее той, что рассматривал Розенблатт, например такой:
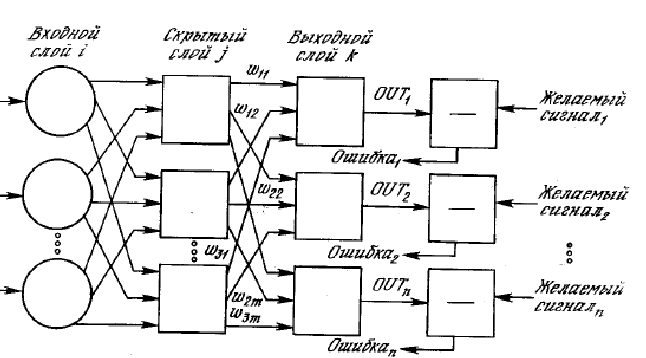
Рис. 3. Схема нейронной сети Розенблатта.
Усложнения приводили к увеличению числа настраиваемых параметров при обучении, но при этом увеличивали возможность настраиваться на очень сложные закономерности. Исследования в этой области сейчас идут по двум тесно связанным направлениям - изучаются и различные топологии сетей и различные методы настроек.
Нейронные сети на данный момент являются не только инструментом решения задач распознавания образов, но получили применение в исследованиях по ассоциативной памяти, сжатию изображений. Хотя это направление исследований и пересекается сильно с проблематикой распознавания образов, но представляет собой отдельный раздел кибернетики. Для распознавателя на данный момент, нейронные сети не более чем очень специфически определенное, параметрически заданное множество отображений, которое в этом смысле не имеет каких-либо существенных преимуществ над многими другим подобными моделями обучения которые далее будут кратко перечислены.
В связи с данной оценкой роли нейронных сетей для собственно распознавания (то есть не для бионики, для которой они имеют первостепенное значение уже сейчас) хотелось бы отметить следующее: нейронные сети, будучи чрезвычайно сложным объектом для математического анализа, при грамотном их использовании, позволяют находить весьма нетривиальные законы в данных. Их трудность для анализа, в общем случае, объясняется их сложной структурой и как следствие, практически неисчерпаемыми возможностями для обобщения самых различных закономерностей. Но эти достоинства, как это часто и бывает, являются источником потенциальных ошибок, возможности переобучения. Как будет рассказано далее, подобный двоякий взгляд на перспективы всякой модели обучения является одним из принципов машинного обучения.
Еще одним популярным направлением в распознавании являются логические правила и деревья решений. В сравнении с вышеупомянутыми методами распознавания эти методы наиболее активно используют идею выражения наших знаний о предметной области в виде, вероятно самых естественных (на сознательном уровне) структур - логических правил. Под элементарным логическим правилом подразумевается высказывание типа «если неклассифицируемые признаки находятся в соотношении X то классифицируемые находятся в соотношении Y». Примером такого правила в медицинской диагностике служит следующее: если возраст пациента выше 60 лет и ранее он перенёс инфаркт, то операцию не делать - риск отрицательного исхода велик.
Для поиска логических правил в данных необходимы 2 вещи: определить меру «информативности» правила и пространство правил. И задача поиска правил после этого превращается в задачу полного либо частичного перебора в пространстве правил с целью нахождения наиболее информативных из них. Определение информативности может быть введено самыми различными способами и мы не будем останавливаться на этом, считая что это тоже некоторый параметр модели. Пространство же поиска определяется стандартно.
После нахождения достаточно информативных правил наступает фаза «сборки» правил в конечный классификатор. Не обсуждая глубоко проблемы которые здесь возникают (а их возникает немалое количество) перечислим 2 основных способа «сборки». Первый тип - линейный список. Второй тип – взвешенное голосование, когда каждому правилу ставится в соответствие некоторый вес, и объект относится классификатором к тому классу за который проголосовало наибольшее количество правил.
В действительности, этап построения правил и этап «сборки» выполняются сообща и, при построении взвешенного голосования либо списка, поиск правил на частях прецедентных данных вызывается снова и снова, чтобы обеспечить лучшее согласование данных и модели.
С задачей распознавания образов живые системы, в том числе и человек, сталкиваются постоянно с момента своего появления. В частности, информация, поступающая с органов чувств, обрабатывается мозгом, который в свою очередь сортирует информацию, обеспечивает принятие решения, а далее с помощью электрохимических импульсов передает необходимый сигнал далее, например, органам движения, которые реализуют необходимые действия. Затем происходит изменение окружающей обстановки, и вышеуказанные явления происходят заново. И если разобраться, то каждый этап сопровождается распознаванием.
С развитием вычислительной техники стало возможным решить ряд задач, возникающих в процессе жизнедеятельности, облегчить, ускорить, повысить качество результата. К примеру, работа различных систем жизнеобеспечения, взаимодействие человека с компьютером, появление роботизированных систем и др. Тем не менее, отметим, что обеспечить удовлетворительный результат в некоторых задачах (распознавание быстродвижущихся подобных объектов, рукописного текста) в настоящее время не удается.
Цель работы: изучить историю систем распознавания образов.
Указать качественные изменения произошедшие в области распознавания образов как теоретические, так и технические, с указанием причин;
Обсудить методы и принципы, применяемые в вычислительной технике;
Привести примеры перспектив, которые ожидаются в ближайшем будущем.
1. Что такое распознавание образов?
Первые исследования с вычислительной техникой в основном следовали классической схеме математического моделирования - математическая модель, алгоритм и расчет. Таковыми были задачи моделирования процессов происходящих при взрывах атомных бомб, расчета баллистических траекторий, экономических и прочих приложений. Однако помимо классических идей этого ряда возникали и методы основанные на совершенно иной природе, и как показывала практика решения некоторых задач, они зачастую давали лучший результат нежели решения, основанные на переусложненных математических моделях. Их идея заключалась в отказе от стремления создать исчерпывающую математическую модель изучаемого объекта (причем зачастую адекватные модели было практически невозможно построить), а вместо этого удовлетвориться ответом лишь на конкретные интересующие нас вопросы, причем эти ответы искать из общих для широкого класса задач соображений. К исследованиям такого рода относились распознавание зрительных образов, прогнозирование урожайности, уровня рек, задача различения нефтеносных и водоносных пластов по косвенным геофизическим данным и т. д. Конкретный ответ в этих задачах требовался в довольно простой форме, как например, принадлежность объекта одному из заранее фиксированных классов. А исходные данные этих задач, как правило, задавались в виде обрывочных сведений об изучаемых объектах, например в виде набора заранее расклассифицированных объектов. С математической точки зрения это означает, что распознавание образов (а так и был назван в нашей стране этот класс задач) представляет собой далеко идущее обобщение идеи экстраполяции функции.
Важность такой постановки для технических наук не вызывает никаких сомнений и уже это само по себе оправдывает многочисленные исследования в этой области. Однако задача распознавания образов имеет и более широкий аспект для естествознания (впрочем, было бы странно если нечто столь важное для искусственных кибернетических систем не u1080 имело бы значения для естественных). В контекст данной науки органично вошли и поставленные еще древними философами вопросы о природе нашего познания, нашей способности распознавать образы, закономерности, ситуации окружающего мира. В действительности, можно практически не сомневаться в том, что механизмы распознавания простейших образов, типа образов приближающегося опасного хищника или еды, сформировались значительно ранее, чем возник элементарный язык и формально-логический аппарат. И не вызывает никаких сомнений, что такие механизмы достаточно развиты и у высших животных, которым так же в жизнедеятельности крайне необходима способность различения достаточно сложной системы знаков природы. Таким образом, в природе мы видим, что феномен мышления и сознания явно базируется на способностях к распознаванию образов и дальнейший прогресс науки об интеллекте непосредственно связан с глубиной понимания фундаментальных законов распознавания. Понимая тот факт, что вышеперечисленные вопросы выходят далеко за рамки стандартного определения распознавания образов (в англоязычной литературе более распространен термин supervised learning), необходимо так же понимать, что они имеют глубокие связи с этим относительно узким(но все еще далеко неисчерпанным) направлением .
Уже сейчас распознавание образов плотно вошло в повседневную жизнь и является одним из самых насущных знаний современного инженера. В медицине распознавание образов помогает врачам ставить более точные диагнозы, на заводах оно используется для прогноза брака в партиях товаров. Системы биометрической идентификации личности в качестве своего алгоритмического ядра так же основаны на результатах этой дисциплины. Дальнейшее развитие искусственного интеллекта, в частности проектирование компьютеров пятого поколения, способных к более непосредственному общению с человеком на естественных для людей языках и посредством речи, немыслимы без распознавания. Здесь рукой подать и до робототехники, искусственных систем управления, содержащих в качестве жизненно важных подсистем системы распознавания.
Именно поэтому к развитию распознавания образов с самого начала было приковано немало внимания со стороны специалистов самого различного профиля - кибернетиков, нейрофизиологов, психологов, математиков, экономистов и т.д. Во многом именно по этой причине современное распознавание образов само питается идеями этих дисциплин. Не претендуя на полноту (а на нее в небольшом эссе претендовать невозможно) опишем историю распознавания образов, ключевые идеи .
Определения
Прежде, чем приступить к основным методам распознавания образов, приведем несколько необходимых определений.
Распознавание образов (объектов, сигналов, ситуаций, явлений или процессов) - задача идентификации объекта или определения каких-либо его свойств по его изображению (оптическое распознавание) или аудиозаписи (акустическое распознавание) и другим характеристикам.
Одним из базовых является не имеющее конкретной формулировки понятие множества. В компьютере множество представляется набором неповторяющихся однотипных элементов. Слово "неповторяющихся" означает, что какой-то элемент в множестве либо есть, либо его там нет. Универсальное множество включает все возможные для решаемой задачи элементы, пустое не содержит ни одного.
Образ - классификационная группировка в системе классификации, объединяющая (выделяющая) определенную группу объектов по некоторому признаку. Образы обладают характерным свойством, проявляющимся в том, что ознакомление с конечным числом явлений из одного и того же множества дает возможность узнавать сколь угодно большое число его представителей. Образы обладают характерными объективными свойствами в том смысле, что разные люди, обучающиеся на различном материале наблюдений, большей частью одинаково и независимо друг от друга классифицируют одни и те же объекты. В классической постановке задачи распознавания универсальное множество разбивается на части-образы. Каждое отображение какого-либо объекта на воспринимающие органы распознающей системы, независимо от его положения относительно этих органов, принято называть изображением объекта, а множества таких изображений, объединенные какими-либо общими свойствами, представляют собой образы.
Методика отнесения элемента к какому-либо образу называется решающим правилом. Еще одно важное понятие - метрика, способ определения расстояния между элементами универсального множества. Чем меньше это расстояние, тем более похожими являются объекты (символы, звуки и др.) - то, что мы распознаем. Обычно элементы задаются в виде набора чисел, а метрика - в виде функции. От выбора представления образов и реализации метрики зависит эффективность программы, один алгоритм распознавания с разными метриками будет ошибаться с разной частотой.
Обучением обычно называют процесс выработки в некоторой системе той или иной реакции на группы внешних идентичных сигналов путем многократного воздействия на систему внешней корректировки. Такую внешнюю корректировку в обучении принято называть "поощрениями" и "наказаниями". Механизм генерации этой корректировки практически полностью определяет алгоритм обучения. Самообучение отличается от обучения тем, что здесь дополнительная информация о верности реакции системе не сообщается.
Адаптация - это процесс изменения параметров и структуры системы, а возможно - и управляющих воздействий, на основе текущей информации с целью достижения определенного состояния системы при начальной неопределенности и изменяющихся условиях работы.
Обучение - это процесс, в результате которого система постепенно приобретает способность отвечать нужными реакциями на определенные совокупности внешних воздействий, а адаптация - это подстройка параметров и структуры системы с целью достижения требуемого качества управления в условиях непрерывных изменений внешних условий.
Примеры задач распознавания образов: - Распознавание букв;
И признаков. Такие задачи решаются довольно часто, например, при переходе или проезде улицы по сигналам светофора. Распознавание цвета загоревшейся лампы светофора и знание правил дорожного движения позволяет принять правильное решение о том, можно или нельзя переходить улицу в данный момент.
В процессе биологической эволюции многие животные с помощью зрительного и слухового аппарата решили задачи распознавания образов достаточно хорошо. Создание искусственных систем распознавания образов остаётся сложной теоретической и технической проблемой. Необходимость в таком распознавании возникает в самых разных областях - от военного дела и систем безопасности до оцифровки всевозможных аналоговых сигналов.
Традиционно задачи распознавания образов включают в круг задач искусственного интеллекта .
Направления в распознавании образов
Можно выделить два основных направления :
- Изучение способностей к распознованию, которыми обладают живые существа, объяснение и моделирование их;
- Развитие теории и методов построения устройств, предназначенных для решения отдельных задач в прикладных задачах.
Формальная постановка задачи
Распознавание образов - это отнесение исходных данных к определенному классу с помощью выделения существенных признаков, характеризующих эти данные из общей массы несущественных данных.
При постановке задач распознования стараются пользоваться математическим языком, стараясь в отличии от теории искусственных нейронных сетей , где основой является получение результата путем эксперимента, заменить эксперимент логическими рассуждениями и математическими доказательствами .
Наиболее часто в задачах распознования образов рассматриваются монохромные изображения , что дает возможность рассматривать изображение как функцию на плоскости. Если рассмотреть точечное множество на плоскости T , где функция x (x ,y ) выражает в каждой точке изображения его характеристику - яркость, прозрачность, оптическую плотность, то такая функция есть формальная запись изображения.
Множество же всех возможных функций x (x ,y ) на плоскости T - есть модель множества всех изображений X . Вводя понятие сходства между образами можно поставить задачу распознавания. Конкретный вид такой постановки сильно зависит от последующих этапов при распозновании в соответствии с тем или иным подходом.
Методы распознавания образов
Для оптического распознавания образов можно применить метод перебора вида объекта под различными углами, масштабами, смещениями и т. д. Для букв нужно перебирать шрифт, свойства шрифта и т. д.
Второй подход - найти контур объекта и исследовать его свойства (связность, наличие углов и т. д.)
Еще один подход - использовать искусственные нейронные сети . Этот метод требует либо большого количества примеров задачи распознавания (с правильными ответами), либо специальной структуры нейронной сети, учитывающей специфику данной задачи.
Перцептрон как метод распознавания образов
Ф. Розенблатт вводя понятие о модели мозга , задача которой состоит в том, чтобы показать, как в некоторой физической системе, структура и функциональные свойства которой известны, могут возникать психологические явления - описал простейшие эксперименты по различению . Данные эксперименты целиком относятся к методам распознавания образов, но отличаются тем что алгоритм решения не детерминированный.
Простейший эксперимент, на основе которого можно получить психологически значимую информацию о некоторой системе, сводится к тому, что модели предъявляются два различных стимула и требуется, чтобы она реагировала на них различным образом. Целью такого экперимента может быть исследование возможности их спонтанного различения системой при отсутствии вмешательства со стороны экспериментатора, или, наоборот, изучение принудительного различения, при котором экспериментатор стремится обучить систему проводить требуемую классификацию.
В опыте с обучением перцептрону обычно предъявляется некоторая последовательность образов, в которую входят представители каждого из классов, подлежащих различению. В соответствии с некоторым правилом модификации памяти правильный выбор реакции подкрепляется. Затем перцептрону предъявляется контрольный стимул и определяется вероятность получения правильной реакции для стимулов данного класса. В зависимости от того, совпадает или не совпадает выбранный контрольный стимул с одним из образов, которые использовались в обучающей последовательности, получают различные результаты:
- 1. Если контрольный стимул не совпадает ни с одним из обучающих стимулов, то эксперимент связан не только с чистым различением , но включает в себя и элементы обобщения .
- 2. Если контрольный стимул возбуждает некоторый набор сенсорных элементов, совершенно отличных от тех элементов, которые активизировались при воздействии ранее предъявленных стимулов того же класса, то эксперимент является исследованием чистого обобщения .
Перцептроны не обладают способностью к чистому обобщению, но они вполне удовлетворительно функционируют в экспериментах по различению, особенно если контрольный стимул достаточно близко совпадает с одним из образов, относительно которых перцептрон уже накопил определенный опыт.
Примеры задач распознавания образов
- Распознавание букв.
- Распознавание штрих-кодов.
- Распознавание автомобильных номеров.
- Распознавание лиц.
- Распознавание речи.
- Распознавание изображений.
- Распознавание локальных участков земной коры, в которых находятся месторождения полезных ископаемых.
Программы распознавания образов
См. также
Примечания
Ссылки
- Юрий Лифшиц. Курс «Современные задачи теоретической информатики» - лекции по статистическим методам распознавания образов, распознаванию лиц, классификации текстов
- Journal of Pattern Recognition Research (Журнал исследования распознавания образов)
Литература
- Дэвид А. Форсайт, Джин Понс Компьютерное зрение. Современный подход = Computer Vision: A Modern Approach. - М.: «Вильямс» , 2004. - С. 928. - ISBN 0-13-085198-1
- Джордж Стокман, Линда Шапиро Компьютерное зрение = Computer Vision. - М.: Бином. Лаборатория знаний, 2006. - С. 752. - ISBN 5947743841
- А.Л.Горелик, В.А.Скрипкин , Методы распознавания, М.: Высшая школа, 1989.
- Ш.-К. Чэн , Принципы проектирования систем визуальной информации, М.: Мир, 1994.
Wikimedia Foundation . 2010 .
- в технике научно техническое направление, связанное с разработкой методов и построением систем (в т. ч. на базе ЭВМ) для установления принадлежности некоторого объекта (предмета, процесса, явления, ситуации, сигнала) к одному из заранее… … Большой Энциклопедический словарьОдна из новых обл. кибернетики. Содержанием теории Р. о. является экстраполирование свойств объектов (образов), принадлежащих к нескольким классам, на объекты, близкие к ним в некотором смысле. Обычно при обучении автомата Р. о. имеется… … Геологическая энциклопедия
Англ. recognition, image; нем. Gestalt alterkennung. Раздел математической кибернетики, разрабатывающий принципы и методы классификации и идентификации объектов, описываемых конечным набором признаков, характеризующих их. Antinazi. Энциклопедия… … Энциклопедия социологии
Распознавание образов - метод исследования сложных объектов с помощью ЭВМ; заключается в отборе признаков и разработке алгоритмов и программ, позволяющих ЭВМ по этим признакам автоматически классифицировать объекты. Например определять, к какому… … Экономико-математический словарь
- (техн.), научно техническое направление, связанное с разработкой методов и построением систем (в том числе на базе ЭВМ) для установления принадлежности некоторого объекта (предмета, процесса, явления, ситуации, сигнала) к одному из заранее… … Энциклопедический словарь
РАСПОЗНАВАНИЕ ОБРАЗОВ - раздел математической кибернетики, разрабатывающий и методы классификации, а также идентификации предметов, явлений, процессов, сигналов, ситуаций всех тех объектов, к рые могут быть описаны конечным набором нек рых признаков или свойств,… … Российская социологическая энциклопедия
распознавание образов - 160 распознавание образов: Идентификация форм представлений и конфигураций с помощью автоматических средств




